舵机投放方案
白嫖嘉立创打板
下载工程文件
下载嘉立创EDA专业版
导入专业版

选择刚刚解压的epro文件
下单

点击下单嘉立创,在嘉立创领劵可以免费打板
焊接烧录与连线
焊接
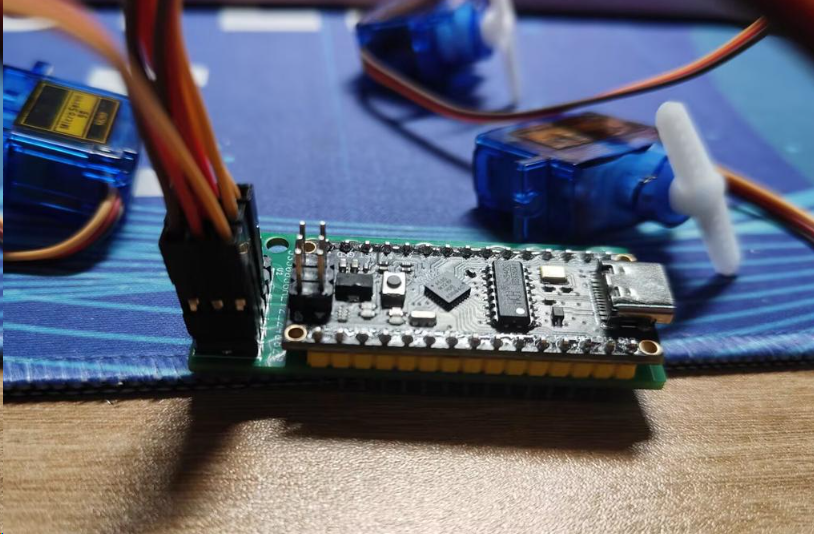
焊上单片机和排针,注意方向,是直接盖在上面的文字上面

板子使用arduino none,购买2.54mm间距3x6P(只用三个买3x3P也可)
烧录与接线
在ubuntu上安装arduino和依赖,烧录servo.ino到单片机中
接入舵机线,靠近单片机的一侧是信号线(黄色)
启动指令
安装依赖
sudo apt update
sudo apt install ros-noetic-rosserial使用数据线连接电脑与单片机
启动下面三个指令
roscorerosrun rosserial_python serial_node.py _port:=/dev/ttyUSB0 _baud:=57600python servo_test.pyservo_test.py程序如下,输入0 180,对应第1pin转到180;输入a 180,使三个舵机全转到180;输入q退出
#!/usr/bin/env python
import rospy
from geometry_msgs.msg import Point
def main():
rospy.init_node('interactive_point_publisher')
pub = rospy.Publisher('/arduino_ros', Point, queue_size=10)
point = Point()
while not rospy.is_shutdown():
try:
user_input = input("Enter coordinate (e.g., '0 180' or 'q' to quit): ")
if user_input.lower() == 'q':
print("Quitting...")
break
axis, value = user_input.split()
value = float(value)
if axis.lower() == '0':
point.x = value
elif axis.lower() == '1':
point.y = value
elif axis.lower() == '2':
point.z = value
elif axis.lower() == 'a':
point.x = value
point.y = value
point.z = value
else:
print("Invalid axis. Please enter '0', '1', '2' or 'a'.")
continue
pub.publish(point)
rospy.loginfo(f"Published: 0={point.x}, 1={point.y}, 2={point.z}")
except ValueError:
print("Invalid input. Please enter in the format 'axis value'.")
except rospy.ROSInterruptException:
break
if __name__ == '__main__':
main()