激光雷达 Mid360
TIP
已购买无人机的用户此步可以跳过,无人机搭载的环境已全部配置妥当
电脑IP设置
sudo gnome-control-center将以太网 IPv4 地址设置如下图所示:
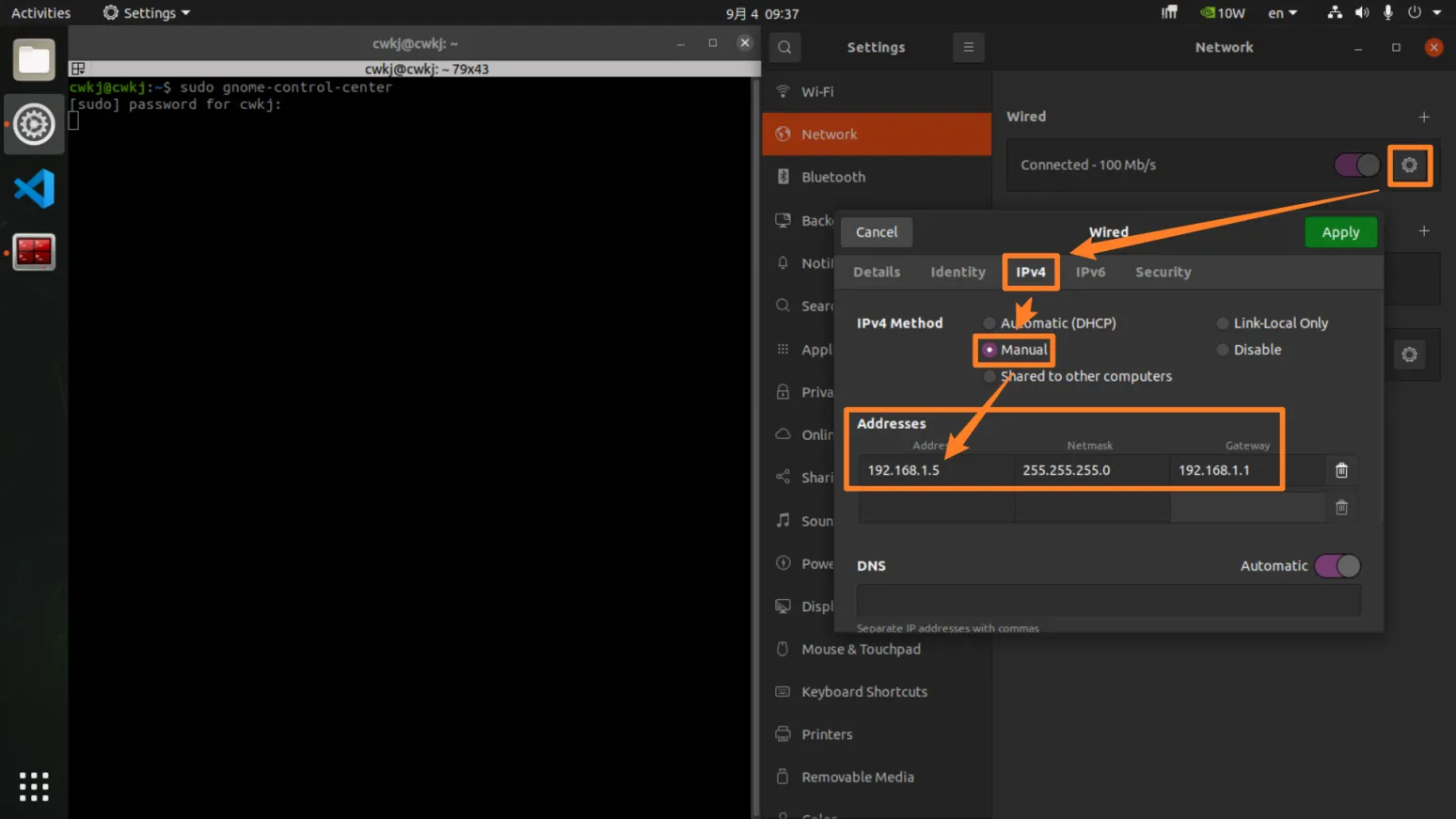
TIP
至于为什么是192.168.1.5,请看这篇帖子:
https://github.com/Livox-SDK/livox_ros_driver2/issues/64
因为有线网口使用了1网段,若路由器也是1网段(192.168.1.0/24),请在路由器后台将设备改至其他网段,以免发生未知的错误
参数配置
首先查看 MID-360 底座上的广播码:

我这台的广播码是47MDM4P0020205,记住这个编码。
找到livox_ros_driver2这个ROS包
roscd livox_ros_driver2用VSCode打开这个包
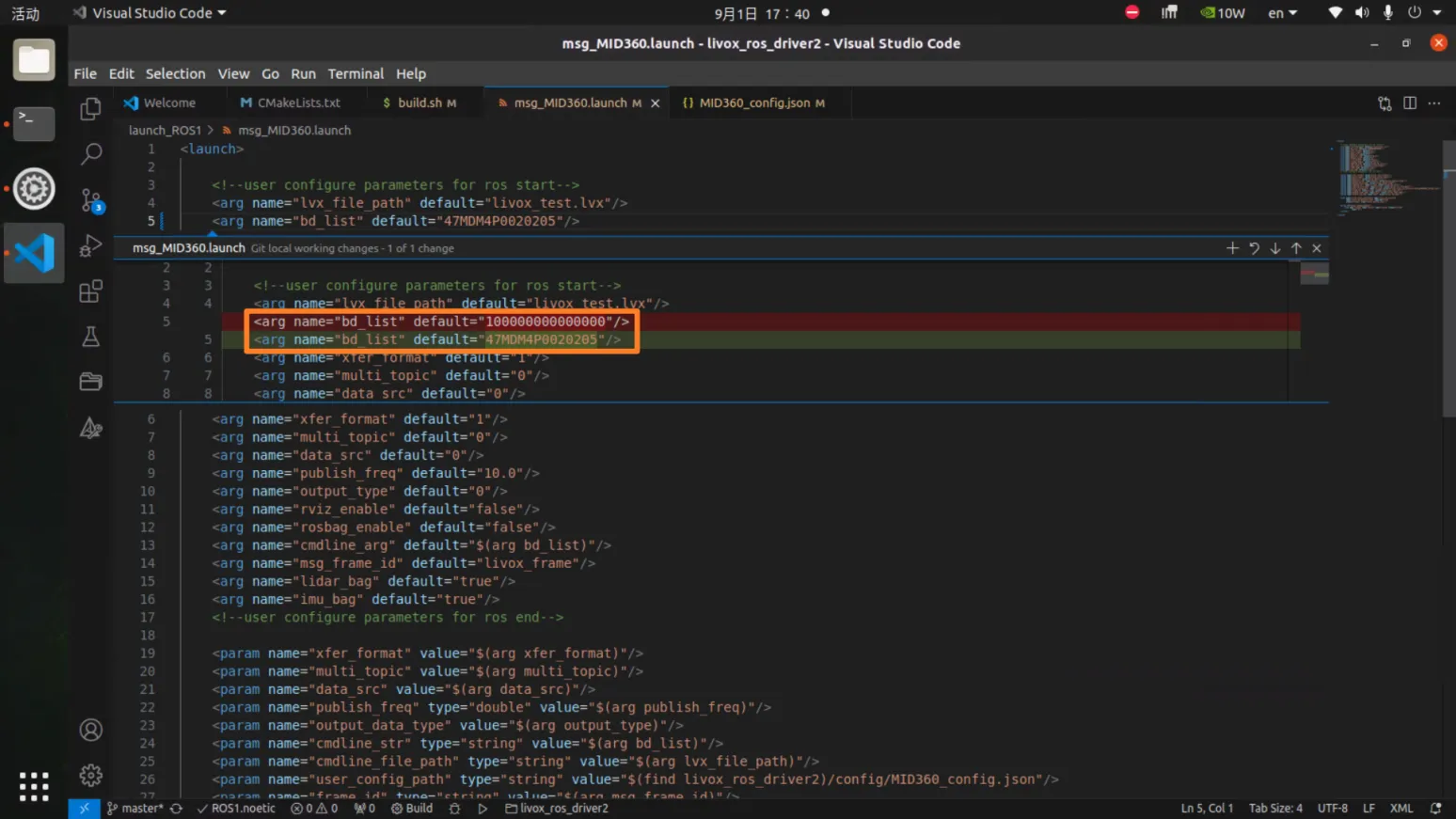
code .bd_list
打开launch_ROS1/msg_MID360.launch,将默认的 bd_list修改为我们的广播码。
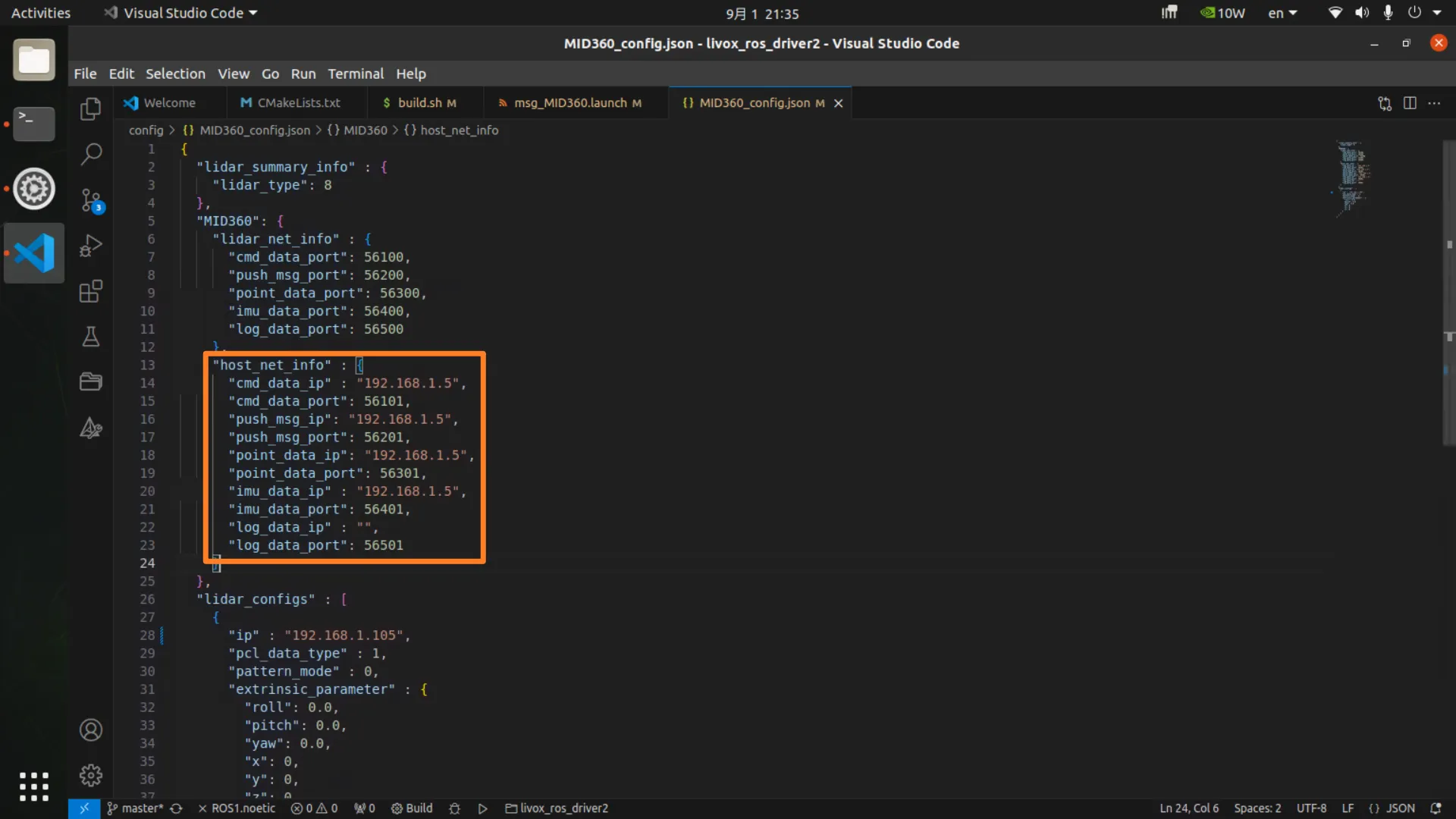
host_net_info
打开config/MID360_config.json,将这些 IP 设置为以太网接口的 IP,也就是192.168.1.5
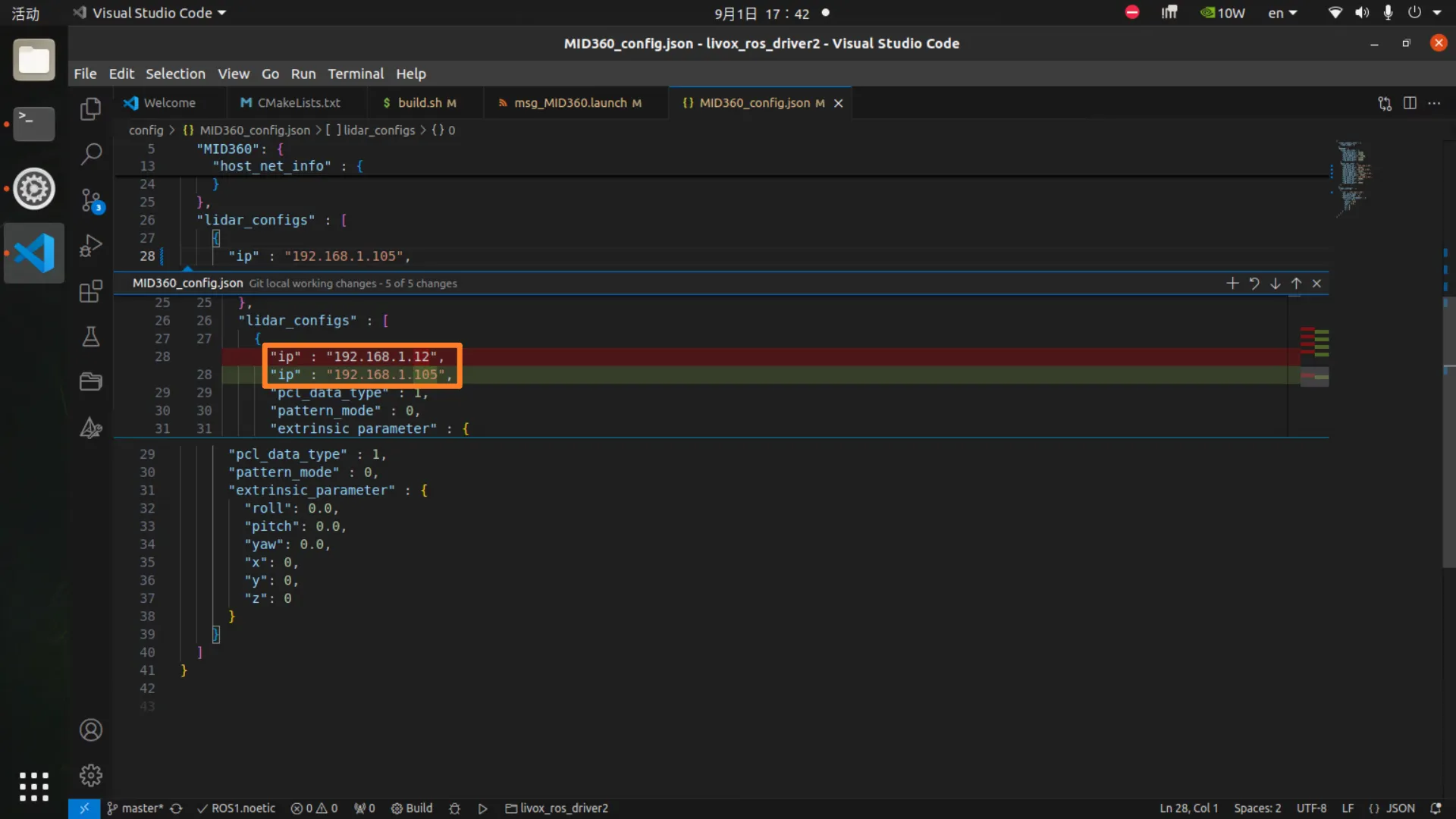
lidar_configs
设置为 192.168.1.1**,最后两位是广播码(47MDM4P0020205)的最后两位(05)。对于我来说就是192.168.1.105。
启动驱动
roslaunch livox_ros_driver2 rviz_MID360.launch
点云数据
在RViz中可以看到点云数据
查看话题
rostopic list
lidar_imu_init功能包使用说明
项目简介
在激光雷达 - 惯性里程计系统中,准确的初始状态十分关键,像激光雷达与IMU之间的时间偏移和外参变换等,通常被视为系统运行的前提条件。不同的机器有不同的参数,在首次试飞前需要进行相应的校准工作。
LI-Init是一个鲁棒实时的激光雷达IMU初始化工具包,可以快速地标定出三维激光雷达和IMU的时差以及外参。该工具包具有较强的鲁棒性,无需任何初值即可优化出相对准确的结果,可以满足绝大多数雷达惯性融合类算法的需求。该文章发布在了2022年的机器人顶会IROS上,项目代码开源在github: LiDAR_IMU_Init

修改相关参数
在进行校准前,需要先修改与所用激光雷达型号对应的yaml文件参数。 编辑~/ivox_ws/src/livox_ros_driver2/config/MID360_config.json,主要修改以下参数:
lid_topic:激光雷达的pointcloud话题imu_topic:IMU话题cut_frame_num:将一帧分割成子帧,提高频率。必须是正整数。orig_odom_freq(Hz):原始激光雷达输入频率。对于大多数激光雷达,输入频率为 10 Hz。机械旋转激光雷达建议cut_frame_num * orig_odom_freq = 30,Livox 激光雷达建议cut_frame_num * orig_odom_freq = 50。mean_acc_norm(m/s^2):IMU 静止时的加速度范数。通常,普通 IMU 为 9.805,livox 内置 IMU 为 1。online_refine_time(second):使用 FAST-LIO2 进行外参优化的时间。建议优化时间为 15~30 秒左右。filter_size_surf(meter):室内场景建议filter_size_surf=0.05~0.15,室外场景建议filter_size_surf=0.5。filter_size_map(meter):室内场景建议filter_size_map=0.15~0.25,室外场景建议filter_size_map=0.5。
设置好正确的话题名称和参数后,你就可以直接使用自己的数据运行 LI-Init 了。
校准
打开终端,运行fastlio
随后在一个新的终端中输入:
roslaunch lidar_imu_init livox_mid360.launch沿各个方向旋转并移动设备,以确保实现充分的激励。 可参考Robust Real-time LiDAR-inertial Initialization(鲁棒且实时的雷达惯性初始化方法)。
初始化和优化完成后,结果将被写入到~/ivox_ws/src/LiDAR_IMU_Init/result/Initialization_result.txt文件中。
填写参数
校准将得到一个从激光雷达(LiDAR)到惯性测量单元(IMU)的齐次变换矩阵:
0.997911 -0.062895 0.014785 -0.147775
0.063313 0.997551 -0.029731 -0.055362
-0.012879 0.030605 0.999449 -0.044644
0.000000 0.000000 0.000000 1.000000将其填入FAST_LIO功能包内的~/livox_ws/src/FAST_LIO/config/mid360.yaml中
//即将修改该部分
extrinsic_T: [ -0.011, -0.02329, 0.04412 ]
extrinsic_R: [ 1, 0, 0,
0, 1, 0,
0, 0, 1]由于得到的是一个4*4的矩阵,填入时要进行转换,如下所示:
最后一列是平移信息,它是一个 [1, 3] 的数组,而旋转矩阵是一个 [3×3] 的数组,转换后填入~/livox_ws/src/FAST_LIO/config/mid360.yaml:
//修改后
extrinsic_T:[-0.147775, -0.055362, -0.044644]
extrinsic_R:[ 0.997911, -0.062895, 0.014785,
0.063313, 0.997551, -0.029731,
-0.012879, 0.030605, 0.999449]