远程连接飞控
远程连接机载电脑
查找飞控设备
确认飞控的串口连接正常
sh
ls /dev/tty*一般是/dev/ttyACM0
为飞控串口赋予读写权限
sh
sudo chmod 777 /dev/ttyACM0MAVROS参数配置
检查MAVROS配置文件,通常位于/opt/ros/noetic/share/mavros/launch文件夹下
sh
roscd mavros/launch为px4.launch文件赋予读写权限
sh
sudo chmod 777 px4.launch修改px4.launch文件:
sh
vim px4.launch有以下2个参数需要修改:
- fcu_url: 要打开的串口名按实际计算机的设备名来设置,波特率设置 57600,则设置为
serial:///dev/ttyACM0:57600 - gcs_url: 飞控与QGC通信的端口。推荐设置为
udp-b://@,即广播,此时局域网内任何一台电脑打开QGC就能连上PX4
修改完成后,保存文件并退出。
开启MAVROS
sh
roslaunch mavros px4.launchMAVROS连接上飞控之后会打印飞控的固件版本等信息。
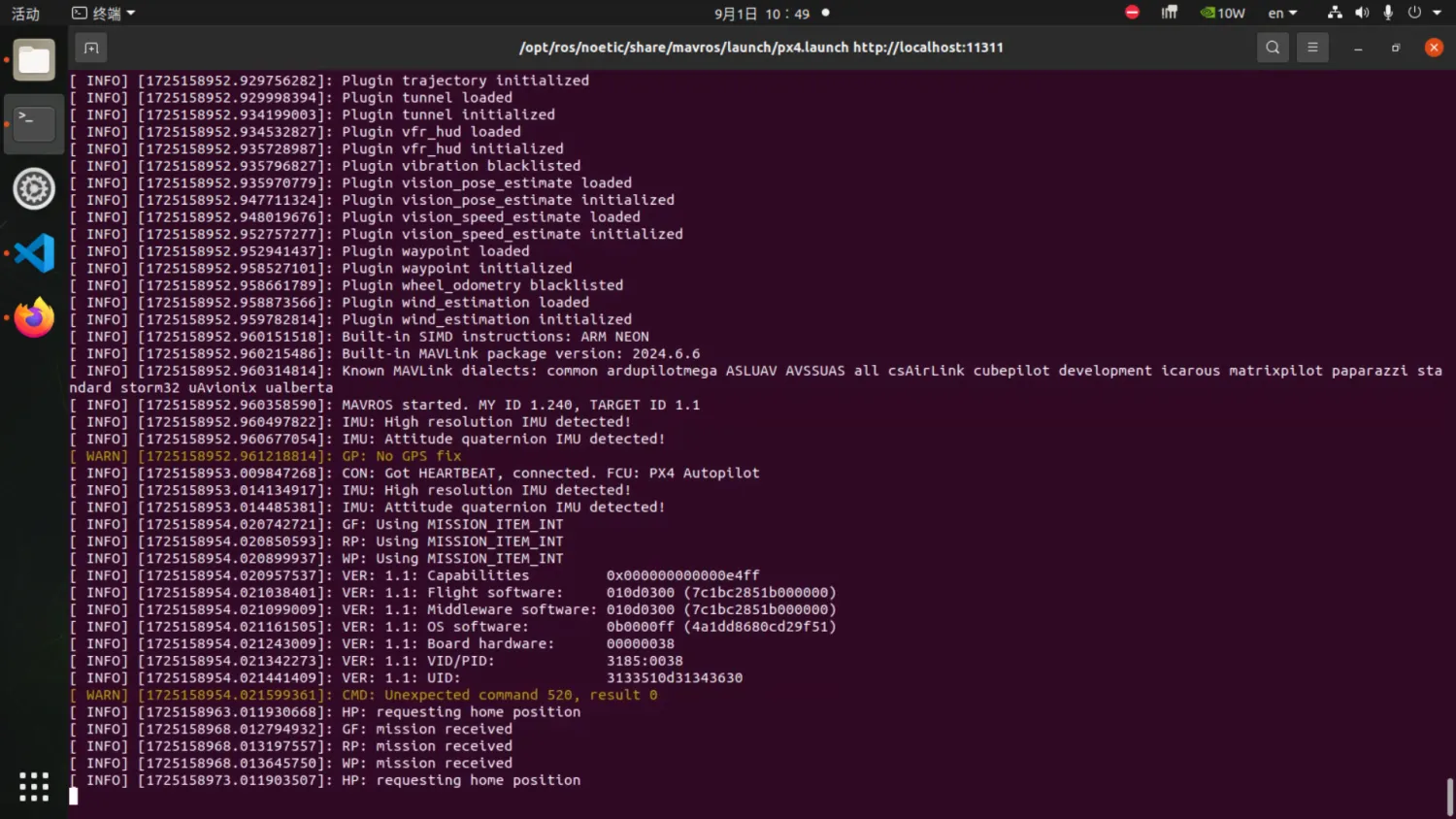
TIP
如果你遇到如下图所示的报错,说明fcu_url可能没有正确设置。
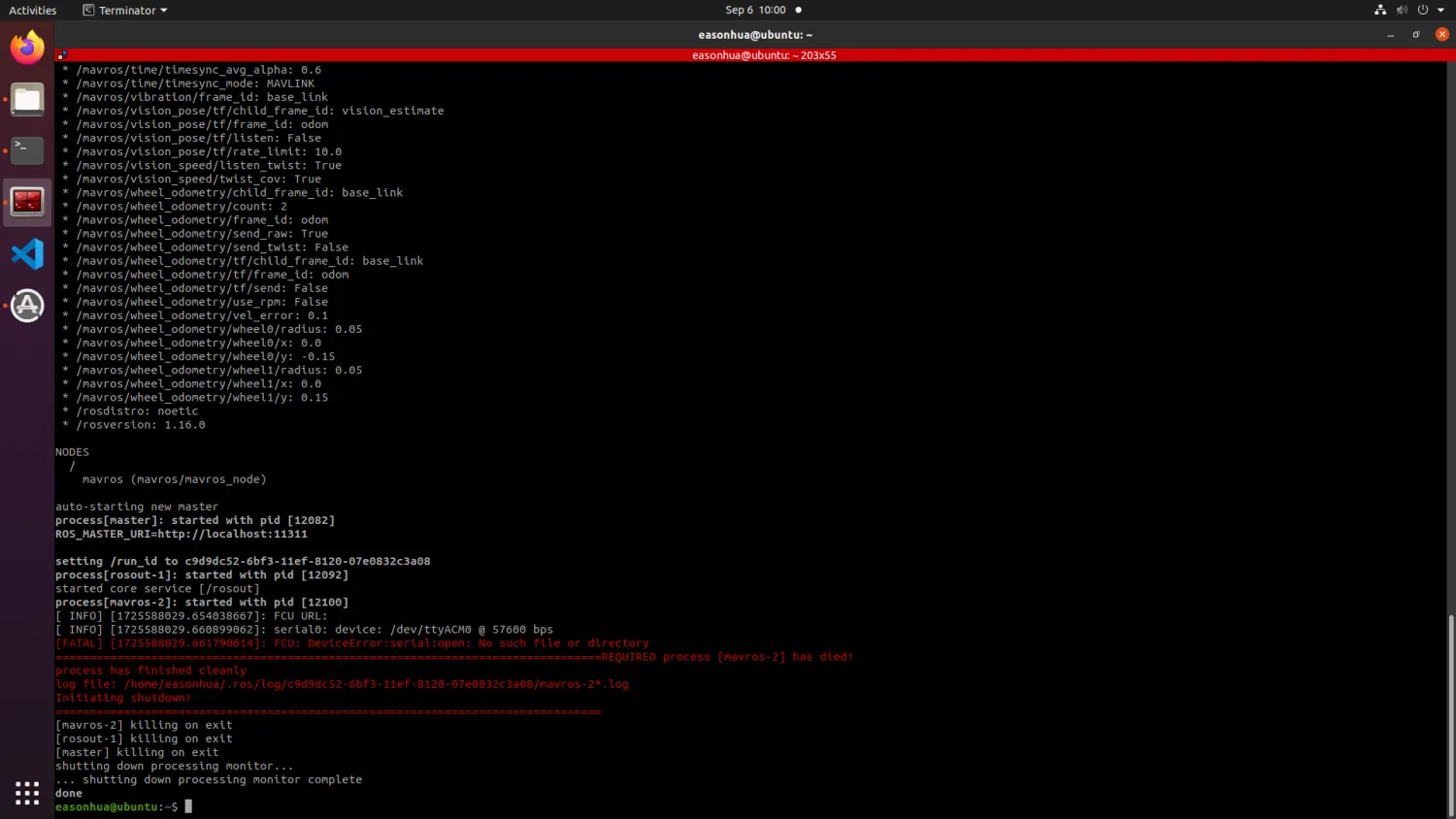
新开一个终端,用以下命令检查MAVROS状态:
sh
rostopic echo /mavros/state若connected: True,则说明MAVROS与PX4通信成功。