定点飞行
快速启动脚本
运行使用tmux快捷脚本直接自动填充好指令
~/uav_ws/src/uav_code/sh/cruise_sim.sh
执行启动指令
打开仿真环境
roslaunch fly_sim sim.launch调整定点飞行参数
打开~/uav_ws/src/uav_code/fly_demo/params/cruise_points.yaml调整参数
需要将改为if_physical: false以使无人机自动起飞,为true时无人机会自动切入offboard,为false时会等待遥控器拨下offboard拨杆
# 仿真还是实物
if_physical: false
# 是否修改最大速度
if_modify_vel_param: true
# z方向0.5m/s
max_vel_z: 0.5
# xy方向0.5m/s
max_vel_xy: 0.5
# 判断到点的阈值 即距离目标点0.3m/s就算到达了
threshold_distance: 0.3
# 目标点个数
navigation_number: 6
point1:
x: 0.0
y: 0.0
z: 1.0
point2:
x: 1.0
y: 0.0
z: 1.0
point3:
x: 1.0
y: 1.0
z: 1.0
point4:
x: 0.0
y: 1.0
z: 1.0
point5:
x: 0.0
y: 0.0
z: 1.0
point6:
x: 0.0
y: 0.0
z: 0.2启动控制代码
roslaunch fly_demo cruise.launch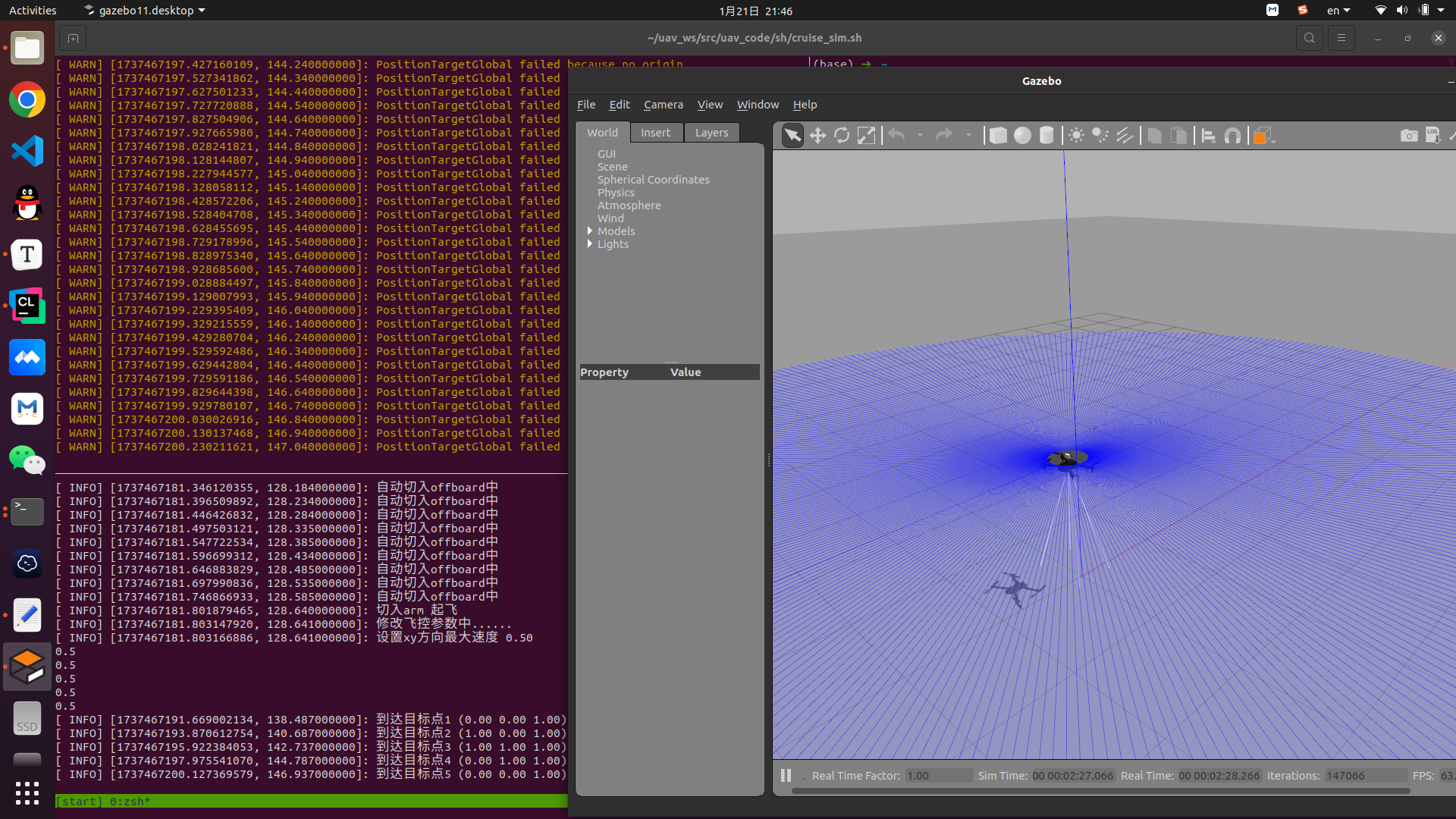
无人机便按照预设的点位依次飞行后降落