CRAIC 人工智能大赛
规则介绍
快速启动脚本
运行使用tmux快捷脚本直接自动填充好指令
~/uav_ws/src/uav_code/sh/craic_sim.sh这里仅以仿真示例
实物脚本是~/uav_ws/src/uav_code/sh/craic_real.sh,需要将~/uav_ws/src/uav_code/fly_demo/params/craic.yaml中的参数改为if_physical: true
执行启动指令
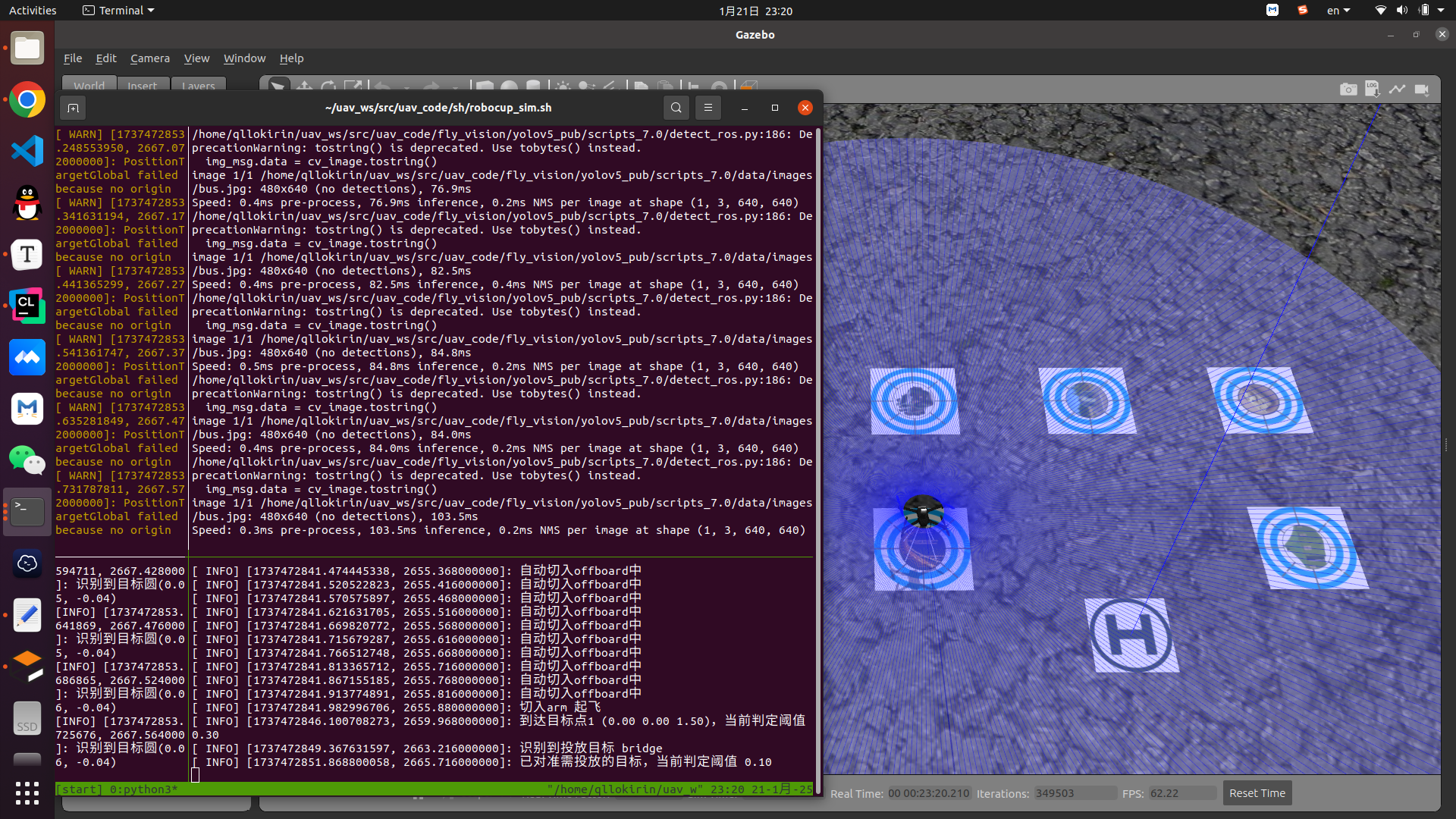
打开仿真环境
roslaunch fly_sim sim.launch world_name:=craic.world打开视觉识别节点
roslaunch circle_qr_detect sim.launch打开舵机驱动(实物飞行中)
rosrun rosserial_python serial_node.py _port:=/dev/ttyUSB0 _baud:=57600启动控制节点
打开~/uav_ws/src/uav_code/fly_demo/params/craic.yaml调整参数
需要将改为if_physical: false以使无人机自动起飞,为true时无人机会自动切入offboard,为false时会等待遥控器拨下offboard拨杆
# 实物还是仿真 仿真(false)中自动起飞 实物(true)中等待遥控器切入offboard模式
if_physical: false
#-------------------------------------
# 速度参数
#-------------------------------------
if_modify_vel_param: true
max_vel_xy: 0.5
max_vel_z: 0.5
threshold_distance_navigation: 0.3
# 目标距离圆多远判定为要投放的目标
distance_to_circle: 0.4
#-------------------------------------
# 投放参数
#-------------------------------------
# 要投放的目标 (俯视) 右下为序号1 右上为序号2 左下为3 左上为4
target1: 3
target2: 4
special_circle_number: 8
unload_z: 0.0
unload_wait_ok_time: 0.8
threshold_distance_unload_alignment: 0.1
threshold_distance_unload: 0.08
#-------------------------------------
# 降落参数
#-------------------------------------
fly_to_land_z: 0.8
land_z: 0.0
threshold_distance_land_alignment: 0.1
threshold_distance_land: 0.05
#-------------------------------------
# 物块参数 前x左y
#-------------------------------------
boxes:
- x: 0.1426
y: 0
- x: 0
y: 0.1426
- x: 0
y: -0.1426
#-------------------------------------
# 点位参数
#-------------------------------------
points:
# 起飞点
- x: 0.0
y: 0.0
z: 1.0
# 二维码
- x: 1.8
y: 0.0
z: 1.0
# 靶子1
- x: 1.8
y: -1.6
z: 1.0
# 靶子2
- x: 3.6
y: -1.6
z: 1.0
# 中转点
- x: 1.8
y: -1.6
z: 1.0
# 靶子3
- x: 1.8
y: 1.6
z: 1.0
# 靶子4
- x: 3.6
y: 1.6
z: 1.0
# 中转点
- x: 6.0
y: 1.0
z: 1.0
# 门前
- x: 6.0
y: -1.0
z: 1.45
# 门后
- x: 6.0
y: -2.35
z: 1.45
# 中转点
- x: 1.6
y: -2.3
z: 1.0启动控制代码
roslaunch fly_demo craic.launch