QGroundControl
安装
请参考官网教程,在个人PC上安装该软件
https://docs.qgroundcontrol.com/master/en/qgc-user-guide/getting_started/download_and_install.html
通讯连接
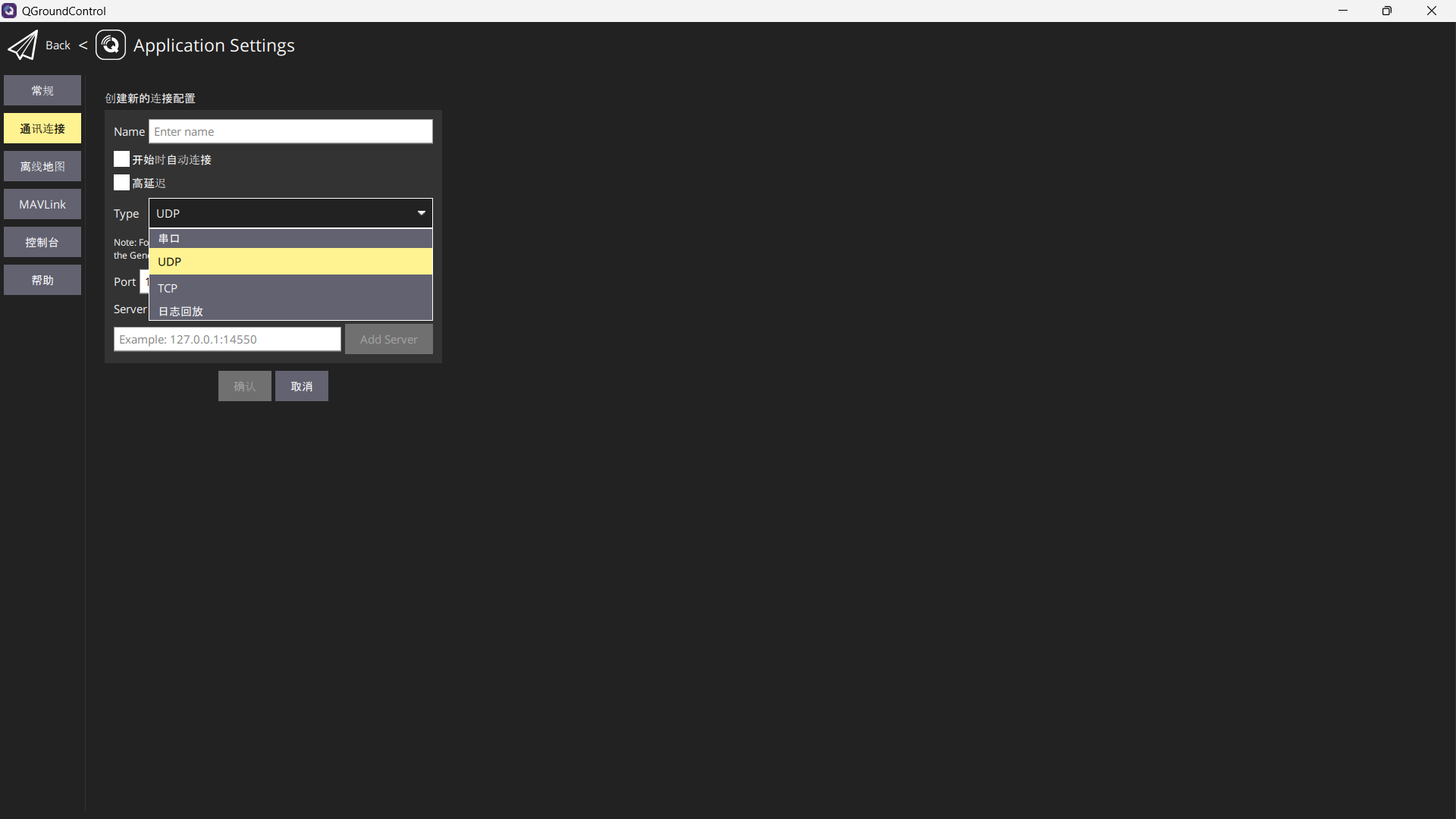
- 点击左上角QGC图标,点击
Application Settings

- 点击左侧列表
通讯连接 - 点击下方
添加 - 在
Name中输入Phoenixtech(为飞机起个名字) - 将
Type设置为UDP - 点击
确定
连接飞控
TIP
只有在无线连接时需要进行以下操作,如果是用USB直接从飞控连接电脑,就不需要
- 在机载电脑上执行以下指令,开启
MAVROS以便连接飞控
sh
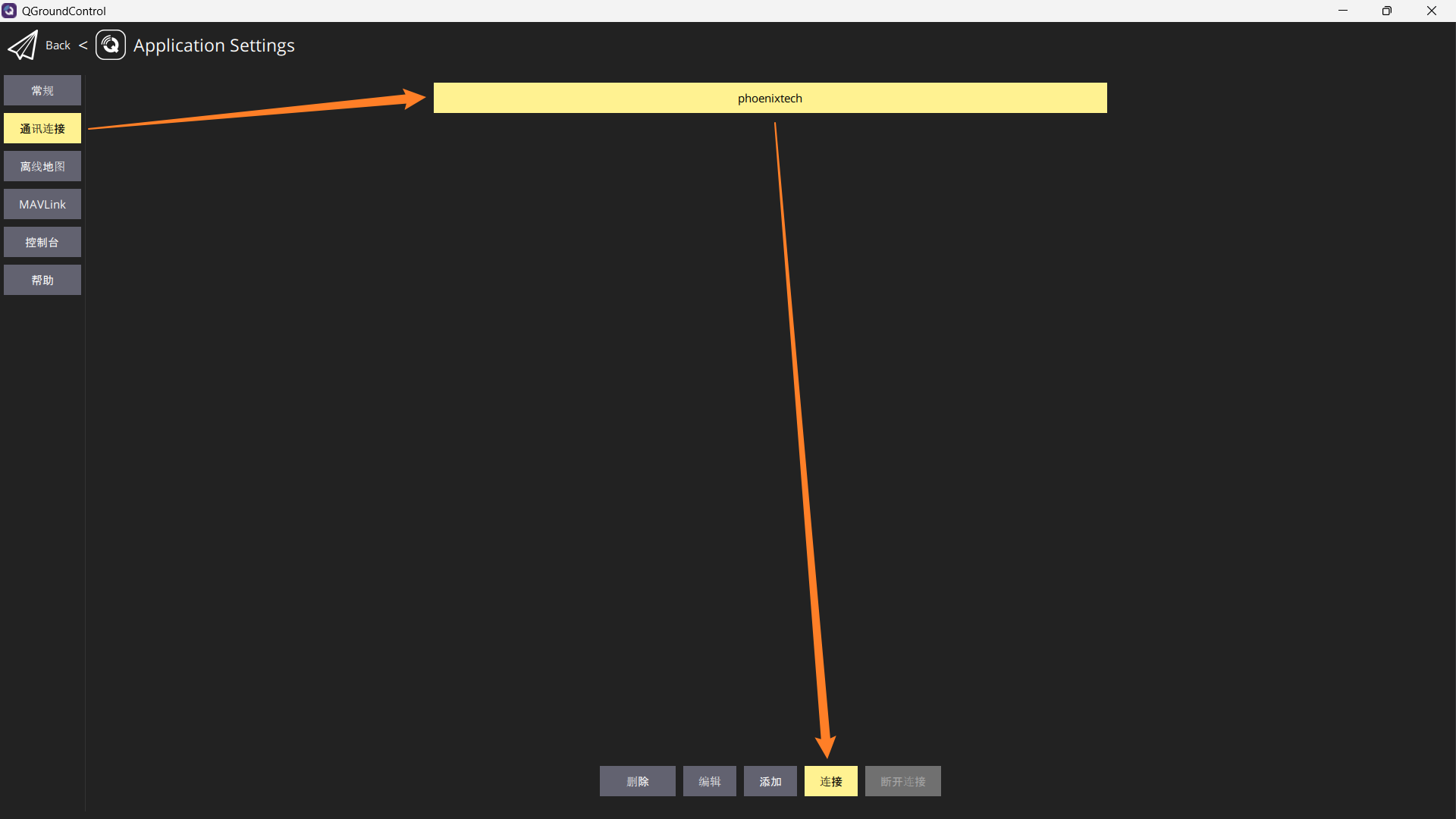
roslaunch mavros px4.launch- 点击QGC左上角图标,点击
Application Settings
- 点击左侧列表
通讯连接,点击Phoenixtech,点击连接
参数设置
点击左上角QGC图标,选择Vehicle Setup,在左侧列表找到参数
WARNING
每次修改完参数,记得在右上角工具中,选择重启飞行器,保存修改结果。
如果是无线连接,每次重启后,需在机载电脑上重新执行roslaunch mavros px4.launch
定位相关
修改以下 4 个参数:
- EKF2_EV_CTRL
设置为由/mavros/vision_pose/pose话题下的数据提供定位信息

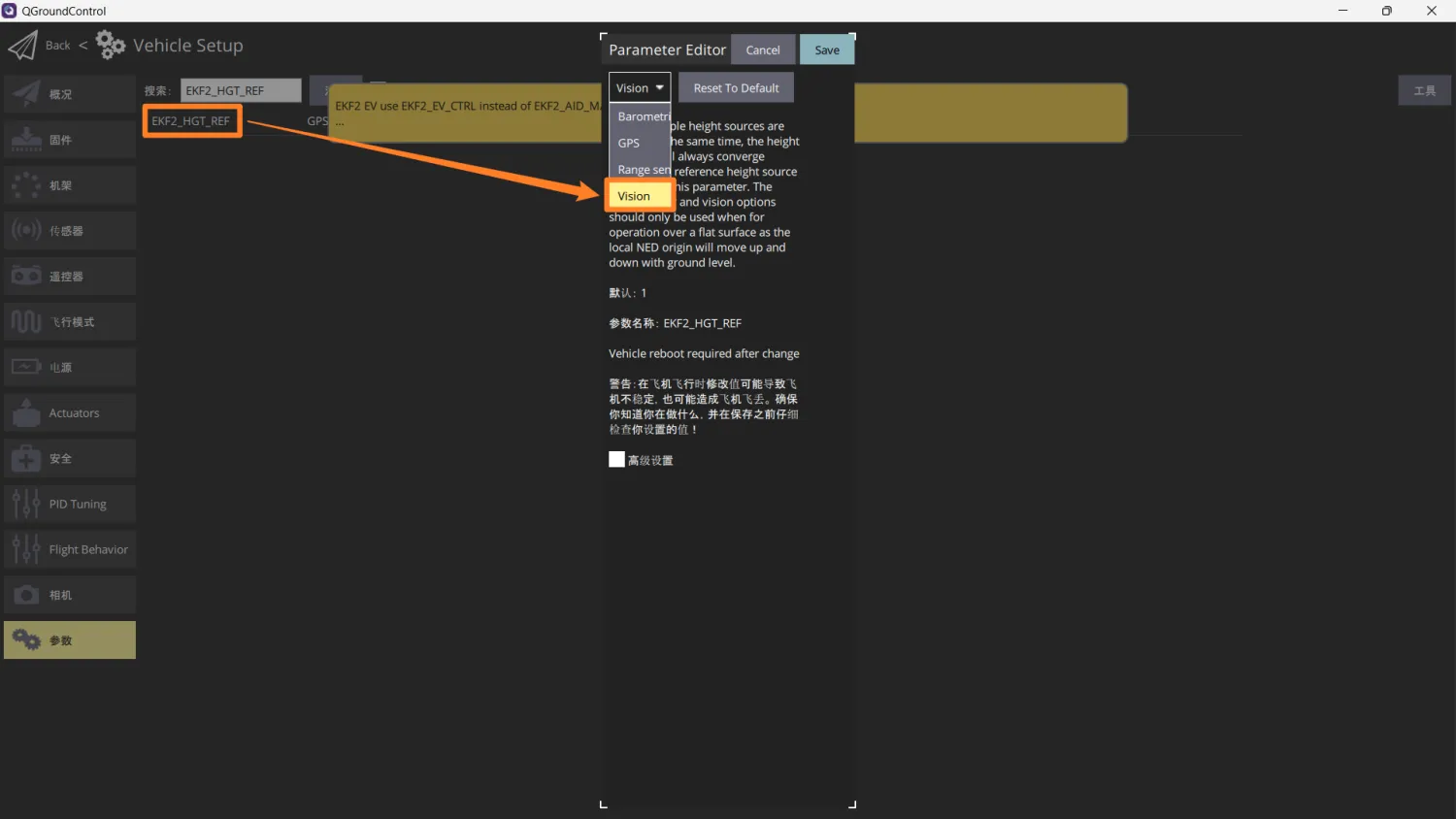
- EKF2_HGT_REF
改用视觉定高
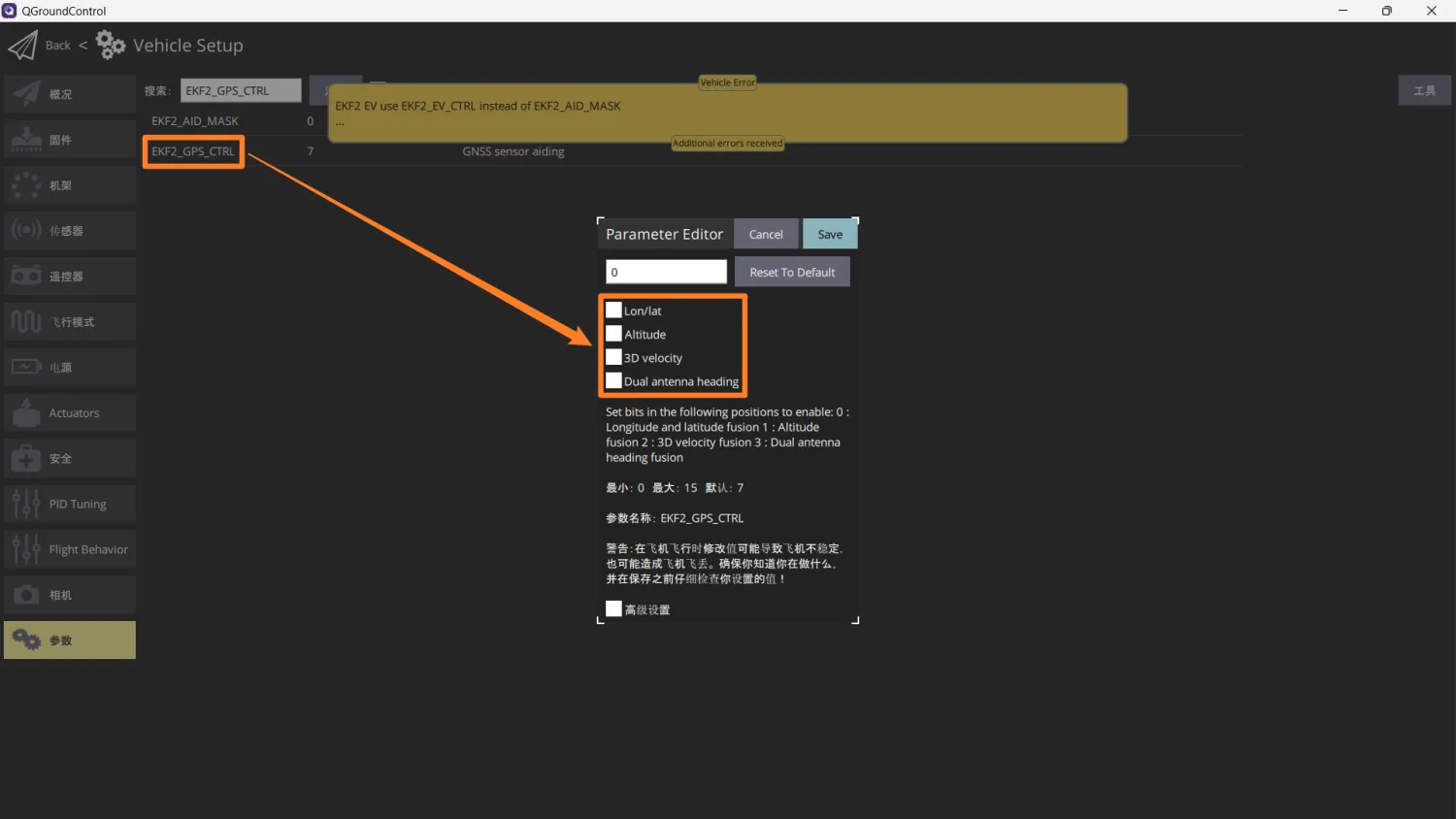
- EKF2_GPS_CTRL
禁用GPS定位(目前飞机没有GPS模块)
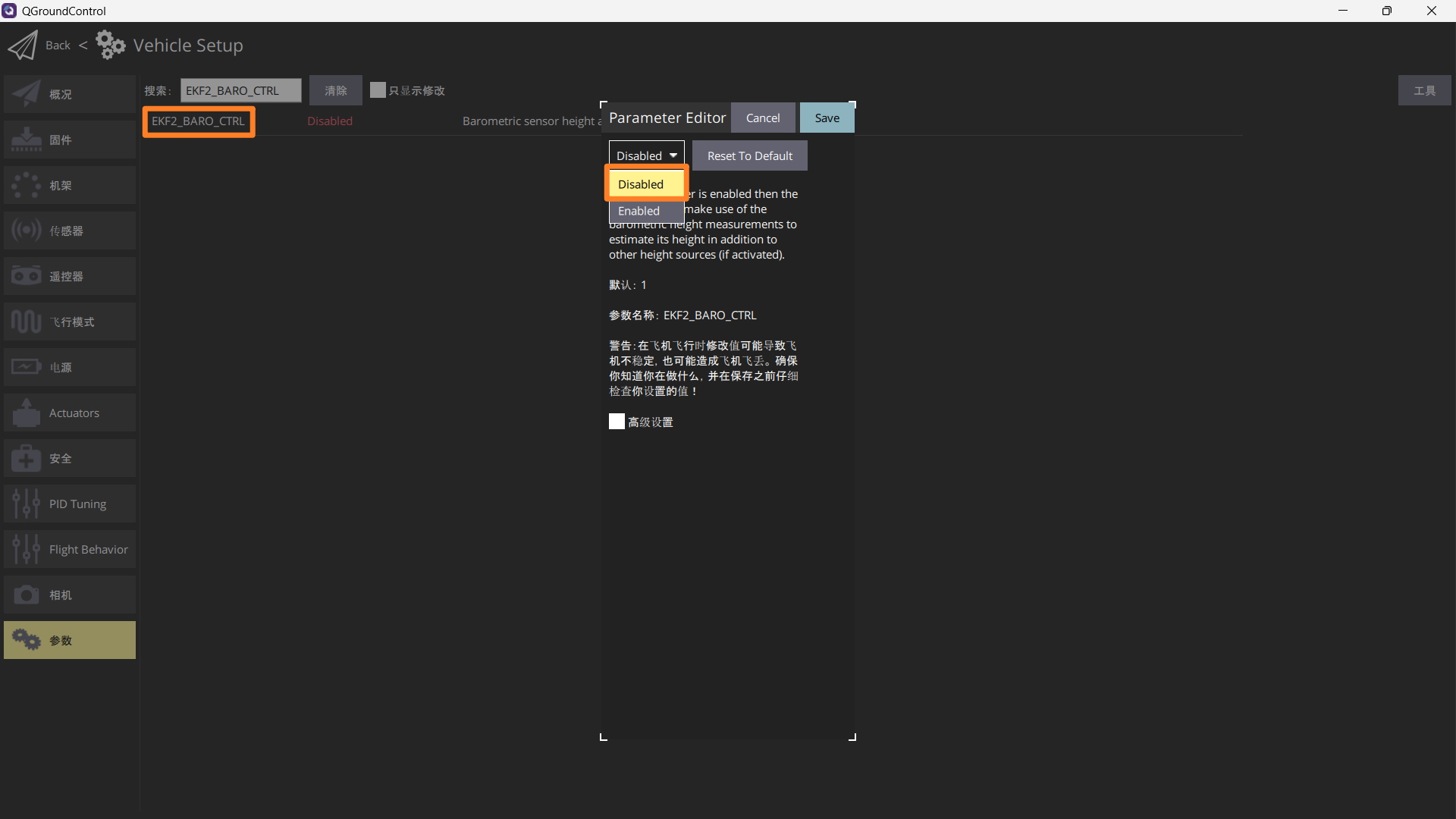
- EKF2_BARO_CTRL
禁用气压计定高(因为不准)
速度限制
修改以下2个参数:
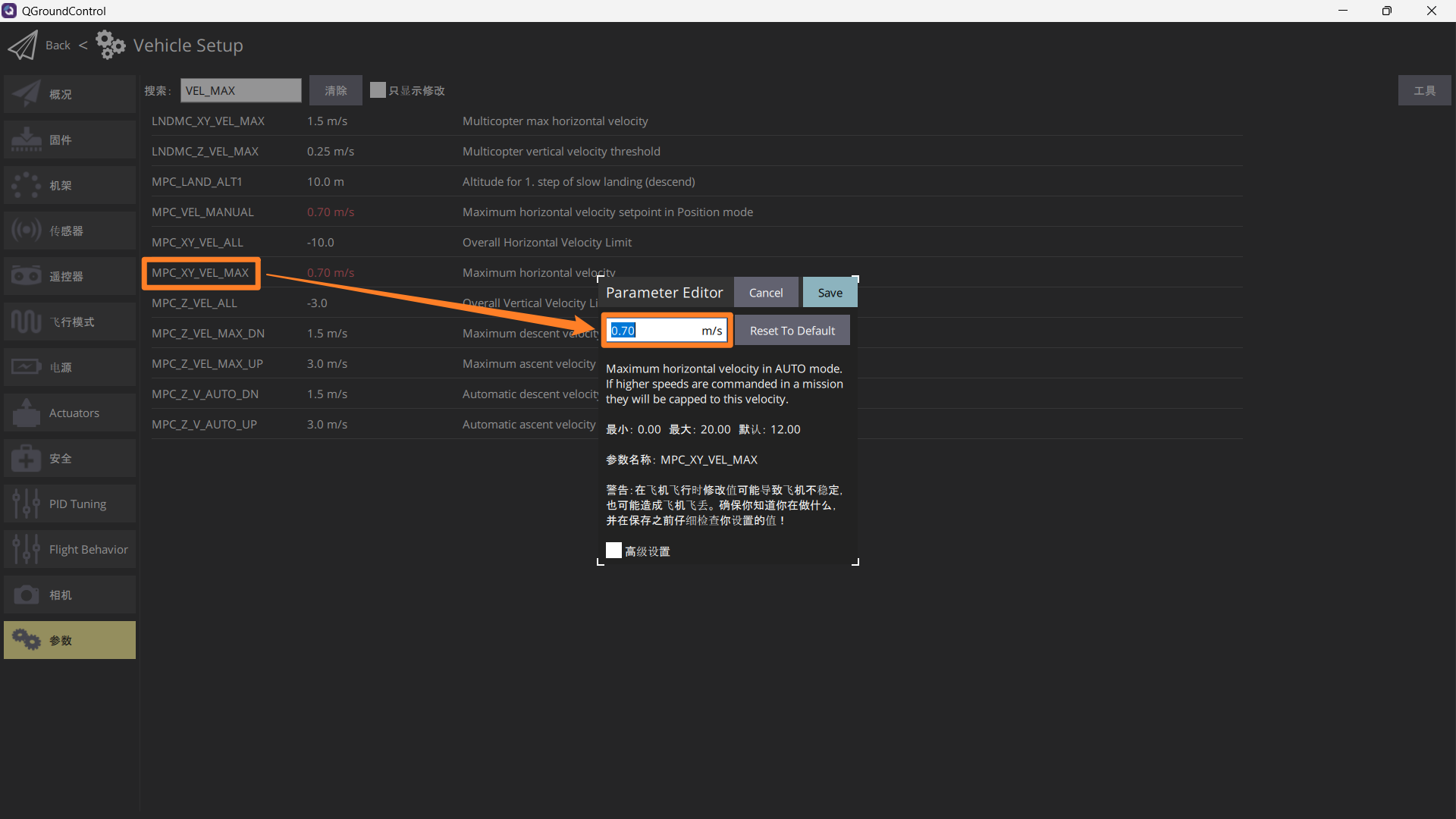
- MPC_XY_VEL_MAX
限制水平方向速度在0.7m/s以内
- MPC_Z_VEL_MAX
可以就按默认的参数来